Hello,
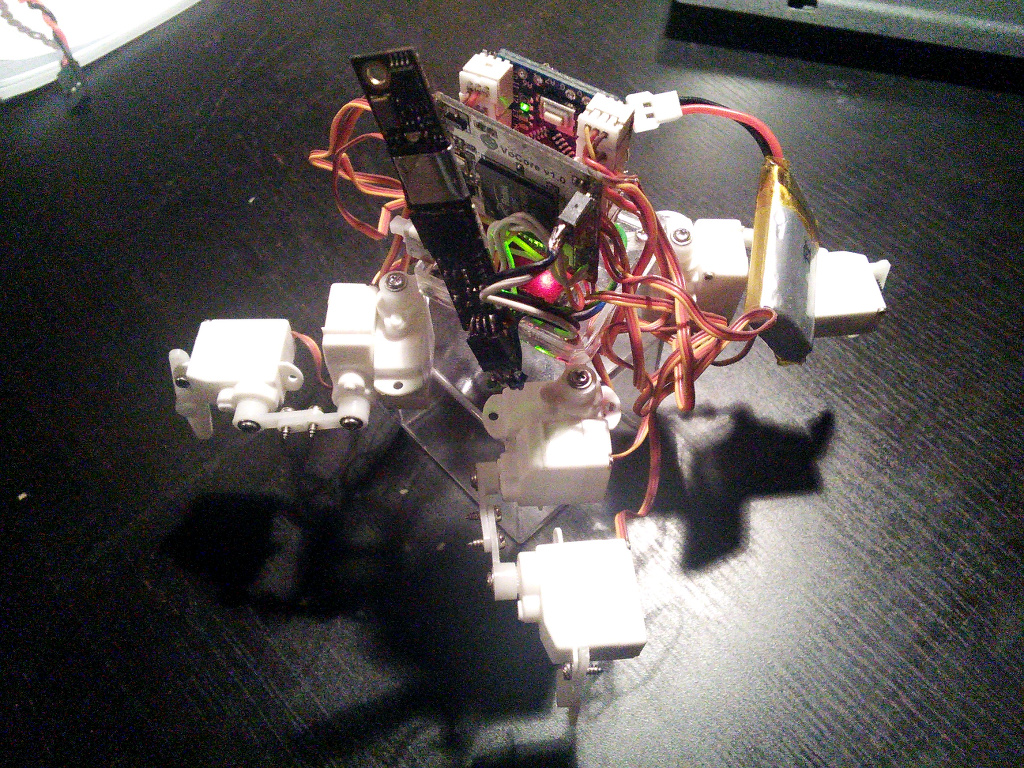
I'm building a very small spider-like robot, and VoCore seems to be the perfect choice for its brains. I didn't want to muck about with PWM drivers, so I decided to make a simple servo controller out of an Arduino Pro Mini, and I plan to communicate with it from VoCore trough TTL, from a program running on Micropython.
You can follow that project here: http://hackaday.io/project/3301-pico-ku ... uped-robot
However, I can't seem to be able to get /dev/ttyS1 to work. Do I need to change something in configuration somewhere to make the other UART (not the one on which the console runs) available?
Pico-Kubik, a tiny quadruped robot
- deshipu
- Posts: 21
- Joined: Wed Nov 19, 2014 5:10 pm
- deshipu
- Posts: 21
- Joined: Wed Nov 19, 2014 5:10 pm
Re: Pico-Kubik, a tiny quadruped robot
Ok, I found http://vonger.cn/?p=1409 telling me how to enable the second UART. Turns out /dev/ttyS1 is used internally and is not the second UART.
- deshipu
- Posts: 21
- Joined: Wed Nov 19, 2014 5:10 pm
Re: Pico-Kubik, a tiny quadruped robot
I have all parts of the robot connected and working, and some simple example programs prove, that it works. Now I need to work on real software for it, and maybe a better chassis.
By the way, I noticed that sometimes (not sure why, weaker battery maybe?) VoCore boots with less memory available than usually:
Any idea why that may be?
By the way, I noticed that sometimes (not sure why, weaker battery maybe?) VoCore boots with less memory available than usually:
- Code: Select all
root@OpenWrt:~# free
total used free shared buffers
Mem: 13312 12712 600 0 804
-/+ buffers: 11908 1404
Swap: 0 0 0
Any idea why that may be?
3 posts
Page 1 of 1
Who is online
Users browsing this forum: No registered users and 429 guests