Pico-Kubik, a tiny quadruped robot
Posted: Wed Nov 19, 2014 11:47 pm
Hello,
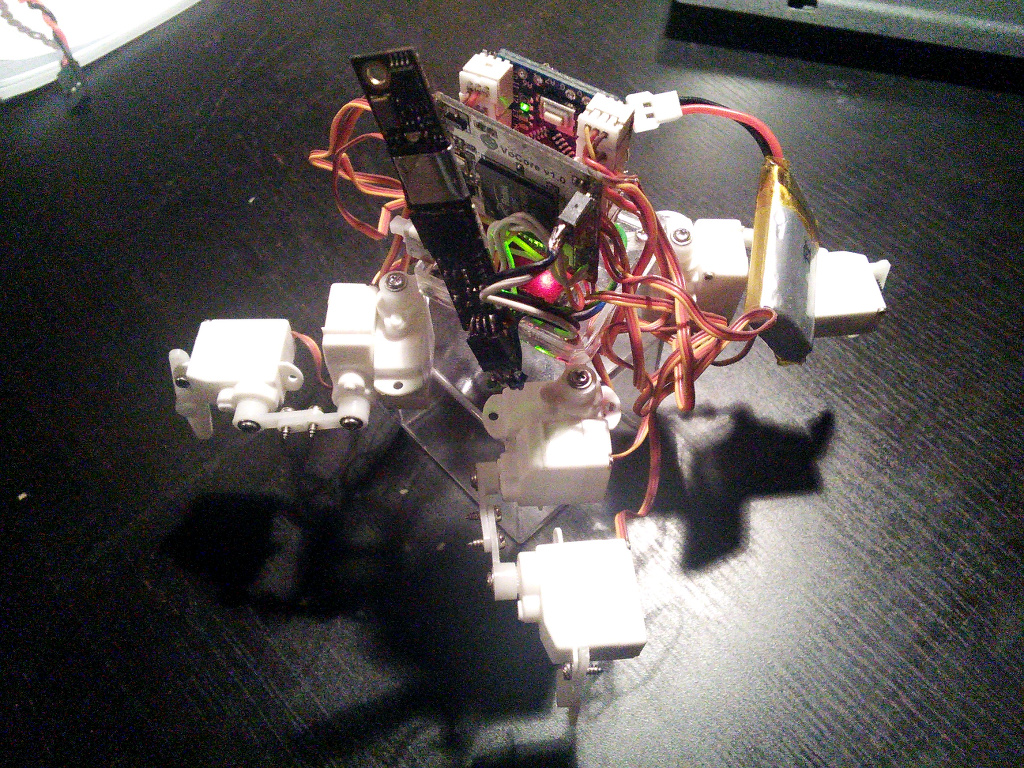
I'm building a very small spider-like robot, and VoCore seems to be the perfect choice for its brains. I didn't want to muck about with PWM drivers, so I decided to make a simple servo controller out of an Arduino Pro Mini, and I plan to communicate with it from VoCore trough TTL, from a program running on Micropython.
You can follow that project here: http://hackaday.io/project/3301-pico-ku ... uped-robot
However, I can't seem to be able to get /dev/ttyS1 to work. Do I need to change something in configuration somewhere to make the other UART (not the one on which the console runs) available?
I'm building a very small spider-like robot, and VoCore seems to be the perfect choice for its brains. I didn't want to muck about with PWM drivers, so I decided to make a simple servo controller out of an Arduino Pro Mini, and I plan to communicate with it from VoCore trough TTL, from a program running on Micropython.
You can follow that project here: http://hackaday.io/project/3301-pico-ku ... uped-robot
However, I can't seem to be able to get /dev/ttyS1 to work. Do I need to change something in configuration somewhere to make the other UART (not the one on which the console runs) available?